本セミナーの教材として使用するモータドライバは、初期状態ではセルフパワー(USBケーブルの他に、別途電源を供給する必要のある)USBデバイスとして動作します。本セミナーでは、簡易的な使用のため、モータドライバに配線を追加してバスパワーUSBデバイスとして使用します。
- 被覆電線を約80mmの長さで切断
- ワイヤストリッパを用い、電線の両端5mmの被覆を剥く
- モータドライバ上の「+5Vin」と「USB5V」の穴に電線を差し込み、半田付け
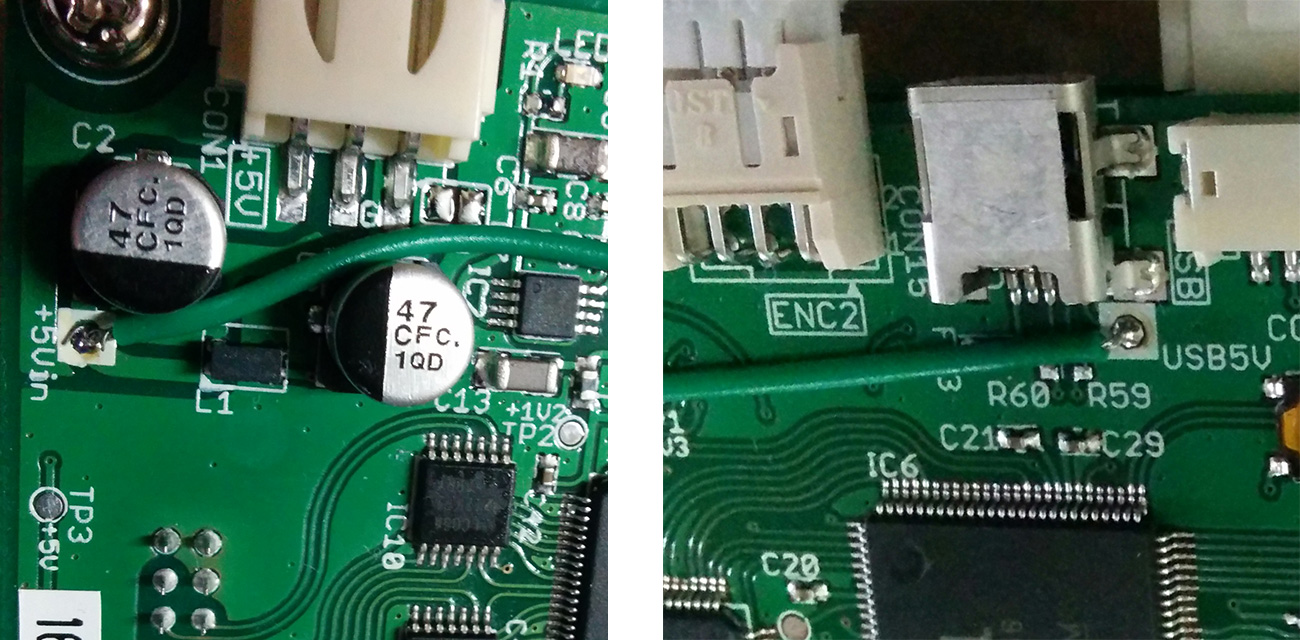
- 半田付けがうまく行えているか確認 (オーガナイザーまたはTAに声をかけてください)
注意:「CON1」から5Vを供給して利用する場合には、ここで半田付けした電線を切除してください。そのままで「CON1」から5Vを供給すると、モータドライバおよびUSBで接続しているPCが破損する可能性があります。
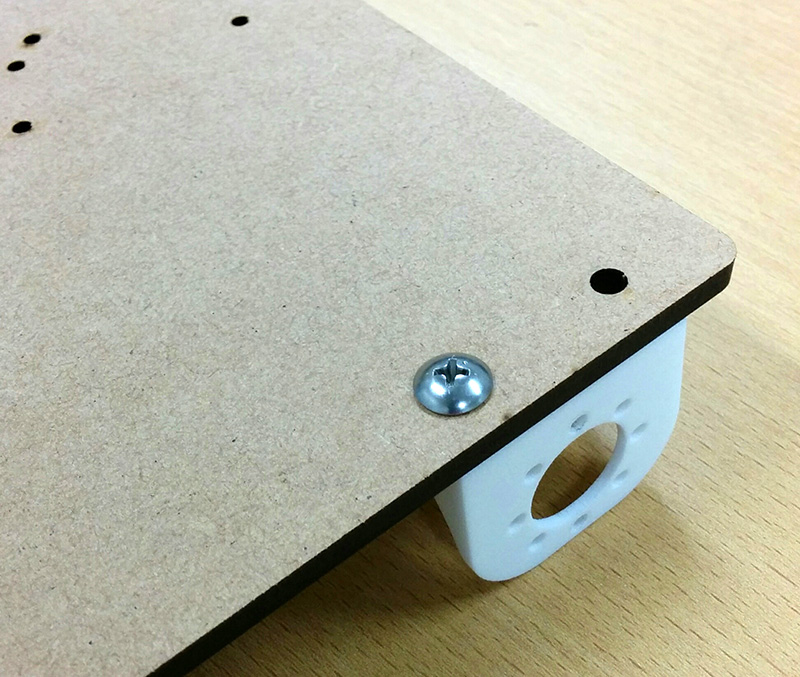
 表からM5のネジを軽く留める
表からM5のネジを軽く留める
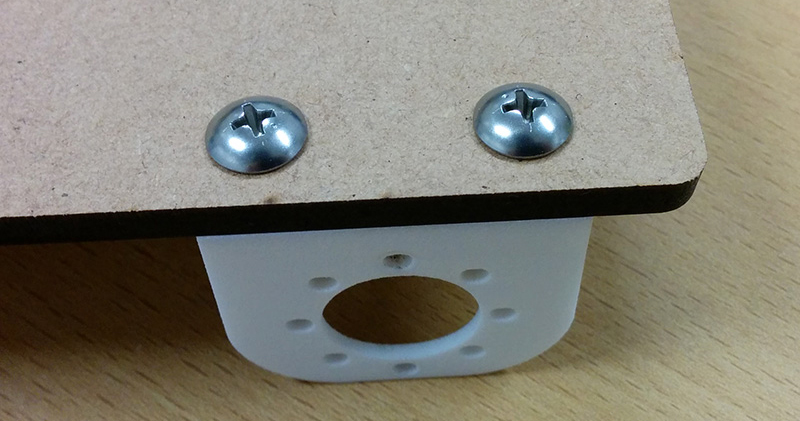
 同様にもう一本もネジ留め
同様にもう一本もネジ留め
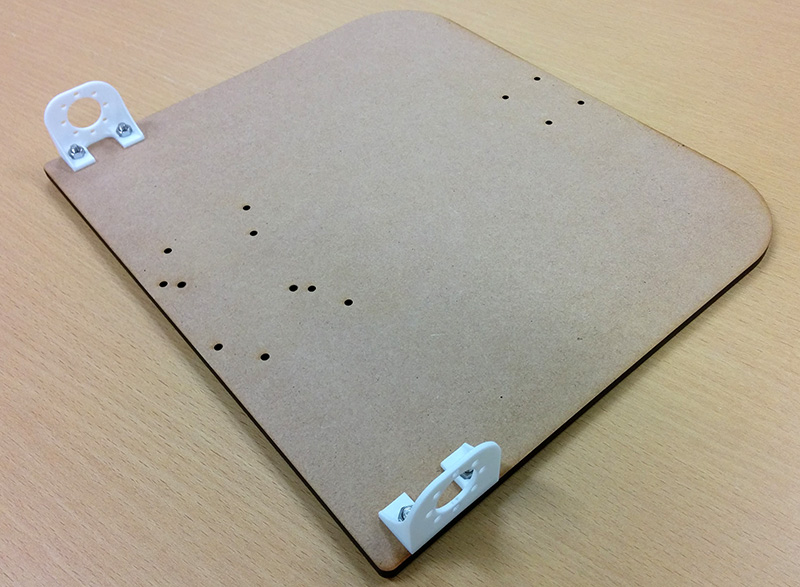
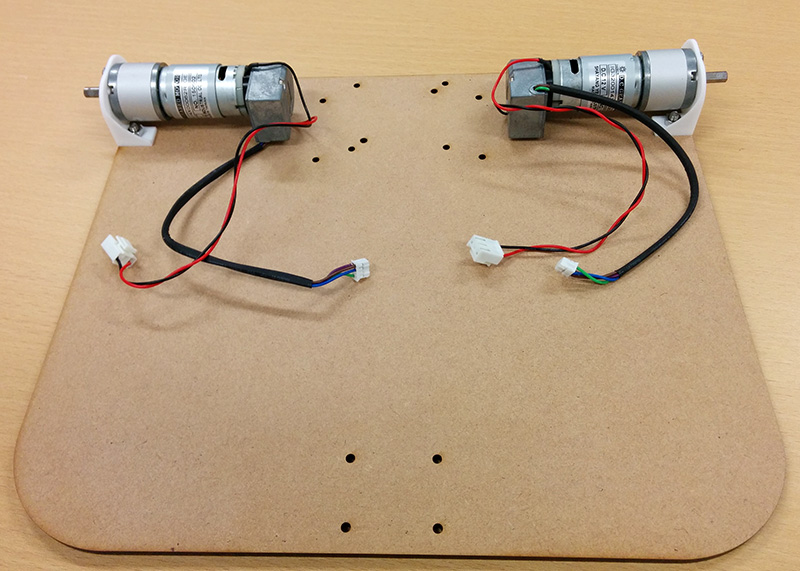
 反対側のモータマウントも同様に取り付け
反対側のモータマウントも同様に取り付け
 モータマウント側面の穴から、M3のネジ(
モータマウント側面の穴から、M3のネジ(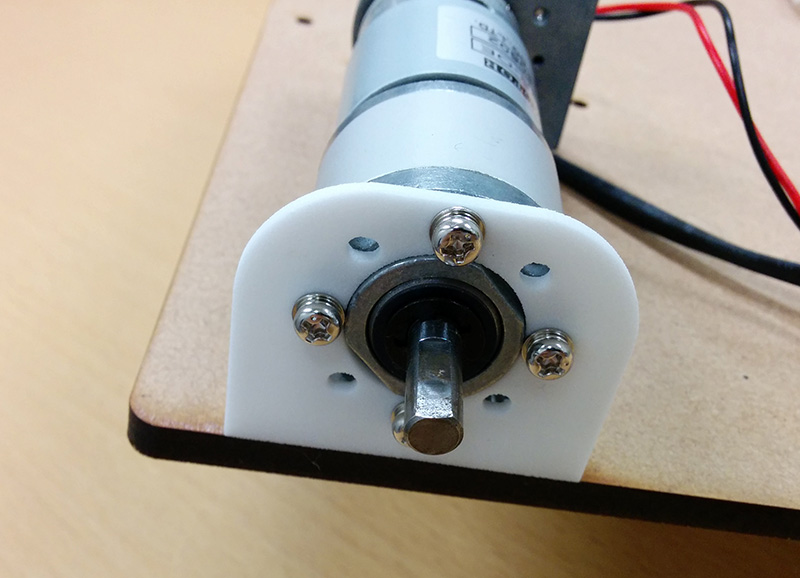 反対側のモータも同様に取り付け
反対側のモータも同様に取り付け
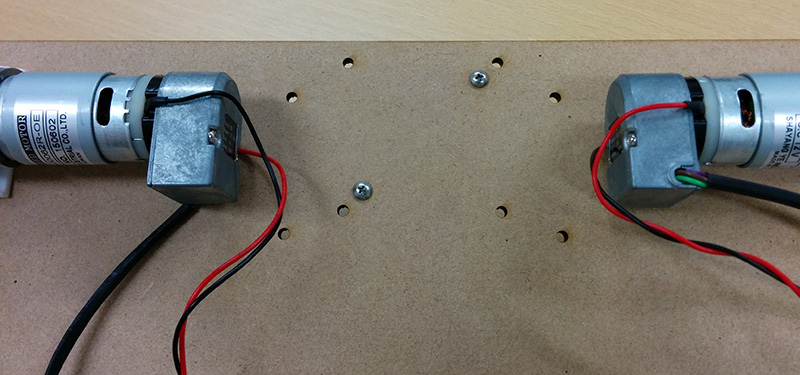
 裏面からM3のネジ2本で固定
裏面からM3のネジ2本で固定
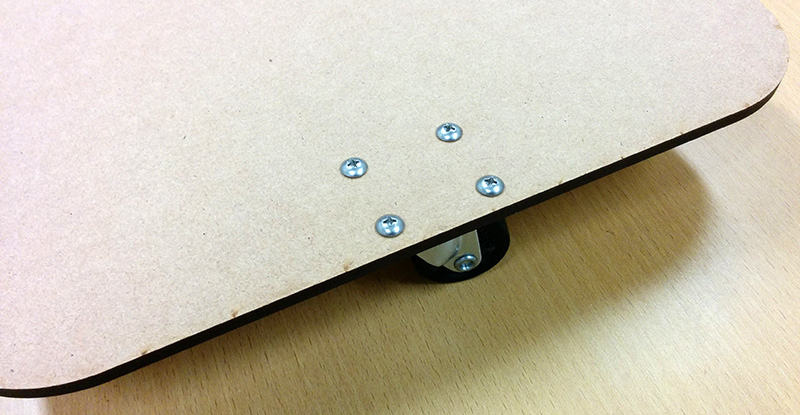 裏面からM4のナットで固定
裏面からM4のナットで固定


 表面からM3のネジで固定
表面からM3のネジで固定

 貼り合わせ後、よく押しつけて、
貼り合わせ後、よく押しつけて、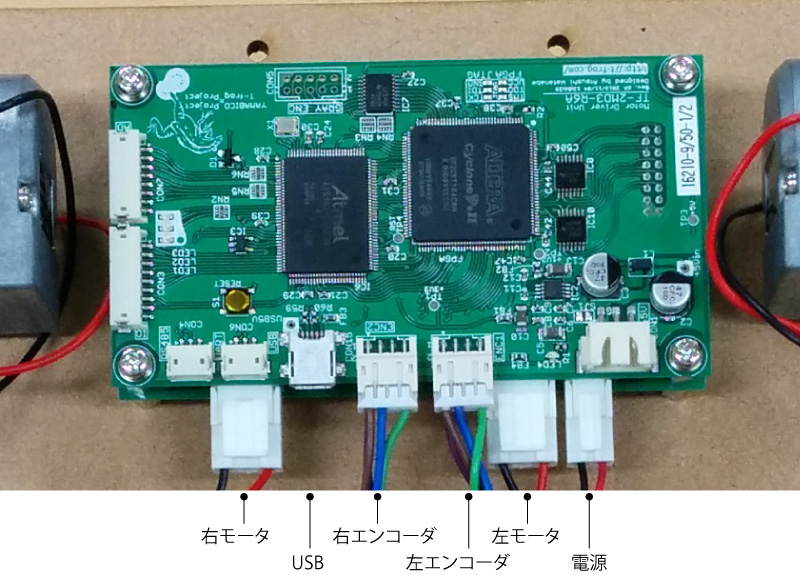
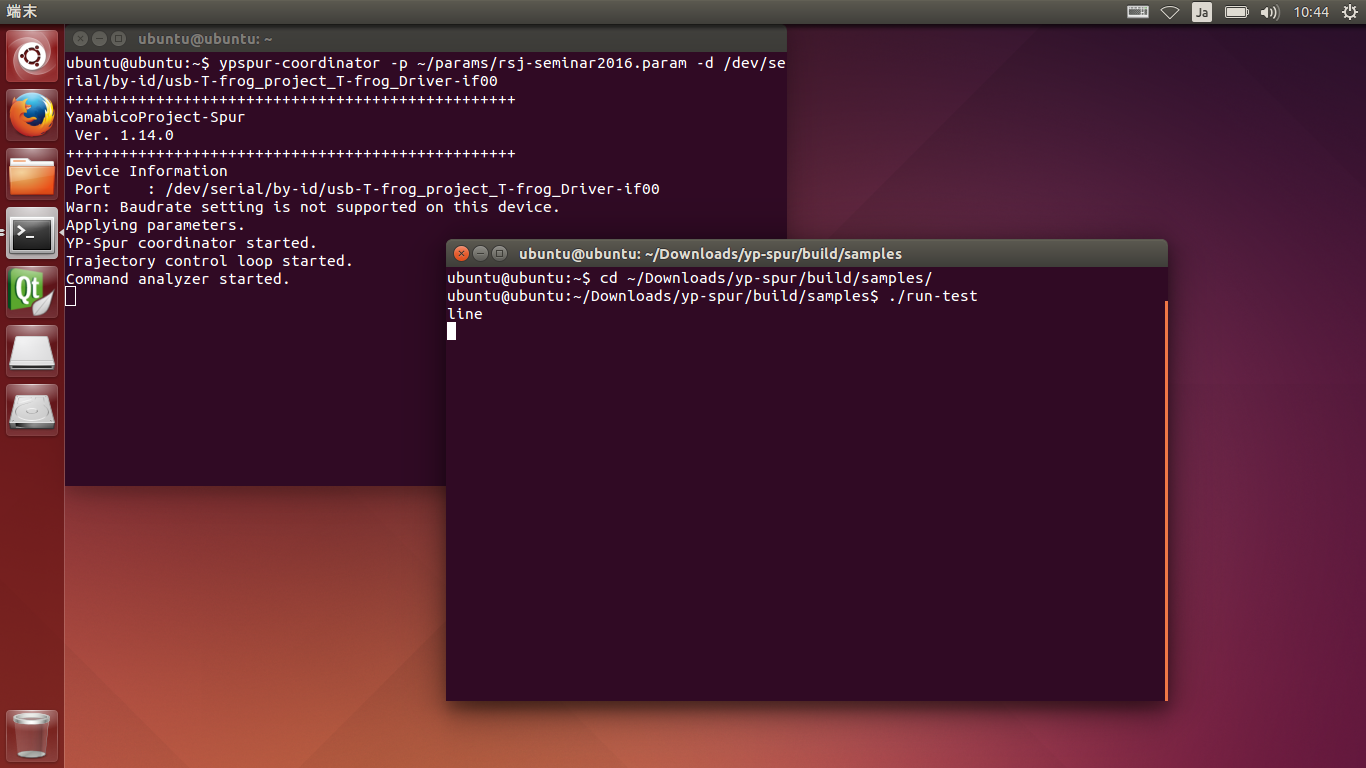 ホイールが回転して、回転方向を何度か変え、最終的に止まることを確認したら、
ホイールが回転して、回転方向を何度か変え、最終的に止まることを確認したら、